
A PDF document of the documentation is available here.
Continue reading “Interactive Media Arts Capstone Documentation”
This is a chronological log of what I have done for this project.
4/10/17
4/9/17
4/8/17
A collection of works created by Minus E, the robot that creates fine arts.
This documentation covers some technical issues I encountered as I work on the IMA capstone interactive project.
Source: https://www.raspberrypi.org/blog/a-security-update-for-raspbian-pixel/
SSH is disabled by default in the latest Raspbian Jessie, however, we can enable it by putting a file called ssh in the /boot/ directory in the sd card. Continue reading “Interactive Media Arts Capstone Technical Documentation”
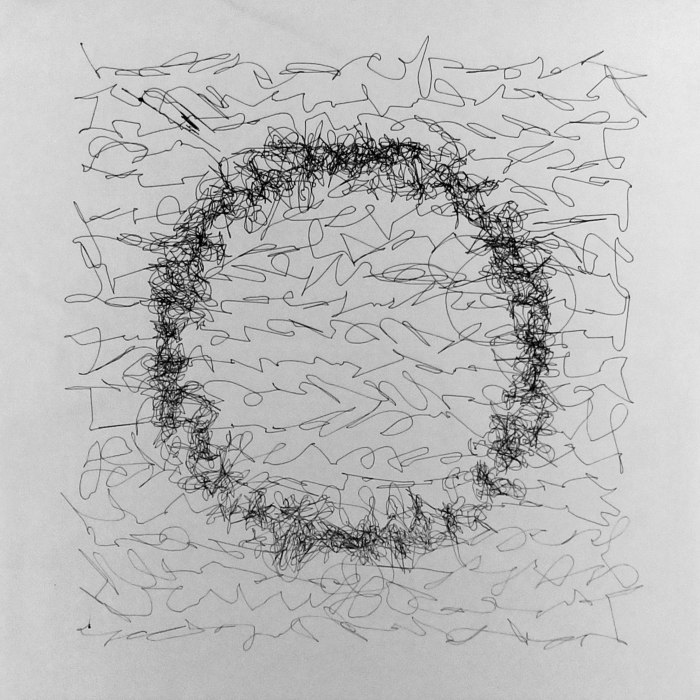
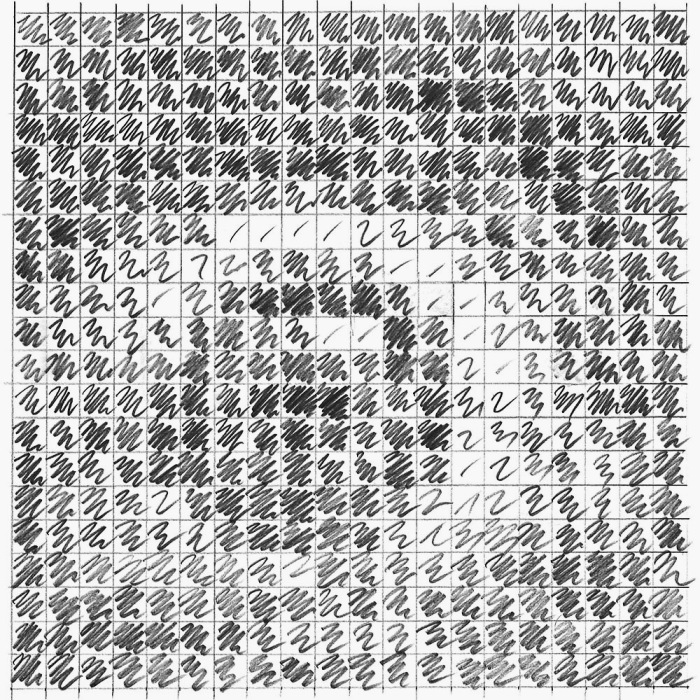
A robot that helps me to create large scale drawings with the reference to an image of my choice.
The reference image will be converted to grayscale and divided into a 20 by 20 grid (or the canonical 32 by 32, if time permits). Each time the robot creates an abstract/representational drawing within one piece of 20-by-20-cm paper, achieving the same tone as the corresponding cell of the reference image. All 400 (or 1024) small drawings will be put together as one 4-by-4-meter (or 6.4-by-6.4-meter) drawing that represents the reference image. If time permits, color will be explored.
A sample drawing by hand can be found below, which shows that the tone of each cell doesn’t have to be very precise to achieve the desired result.
 Continue reading “Interactive Media Arts Capstone Project Conceptual Change”
Continue reading “Interactive Media Arts Capstone Project Conceptual Change”
Projects
Continue reading “Interactive Media Arts Capstone Bibliography”
Robot Artist: A robot that draws
My project is to build a robot artist that draws with a human drawing instrument on a flat surface it sits on. The chassis of the robot will be circular shape and it will be made with either a laser cutter or a 3D printer. The robot will have four omni wheels so as to be able to move to all directions, which is perfect for drawing. However, my experience tells me it is very hard to make the movement accurate with four omni wheels, which is an issue I need to do more research on. There will be a drawing instrument holder at the center of the robot, the height of which will be controlled by a motor so that the drawing instrument can be lift up and put down. The robot will also have at least four ultrasonic sensors to detect the distances from each side to the wall. Ideally, the robot will be put inside of rectangular space with a wall on each side so that the robot can navigate itself based on its distance to each side. If the robot is put to an open space, or non-rectangular space, it may estimate its position with the turnings of each wheel, which might not be very accurate. Continue reading “Interactive Media Arts Capstone Proposal”
Interactive Project
Robot Artist: A robot that draws with a regular pen
I have been having an interest in robot for a long time and I have recently rediscovered my passion for visual arts. Therefore, I would like to combine those two and build a robot artist that draws with a regular pen. The robot will sit on the surface it will draw on, and draw as it moves around on the surface. There are two possible method that the robot will draw. One is to work like a dot matrix printer, the robot striking the pen on the surface, making little dots. The other is to work like a 3d printer, the robot drawing lines as it moves around. Continue reading “Interactive Media Arts Capstone Brief”
